





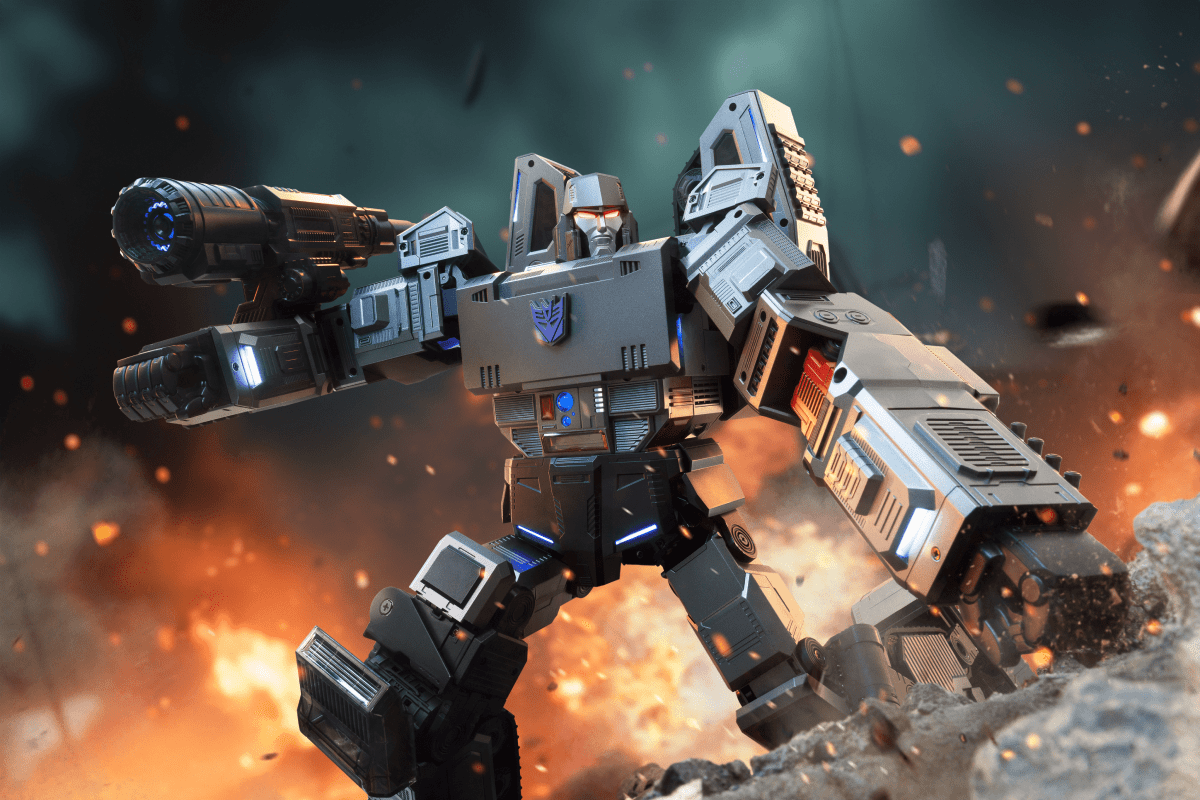
Depuis le lancement des Optimus Prime Flagship et Elite en 2021, Robosen a accueilli son ancien rival, Megatron ! En tant que conception commémorative pour le 40e anniversaire de Hasbro, quelles sont les spécialités techniques de Megatron ?
Puce de haute précision et articulations intelligentes développées en interne
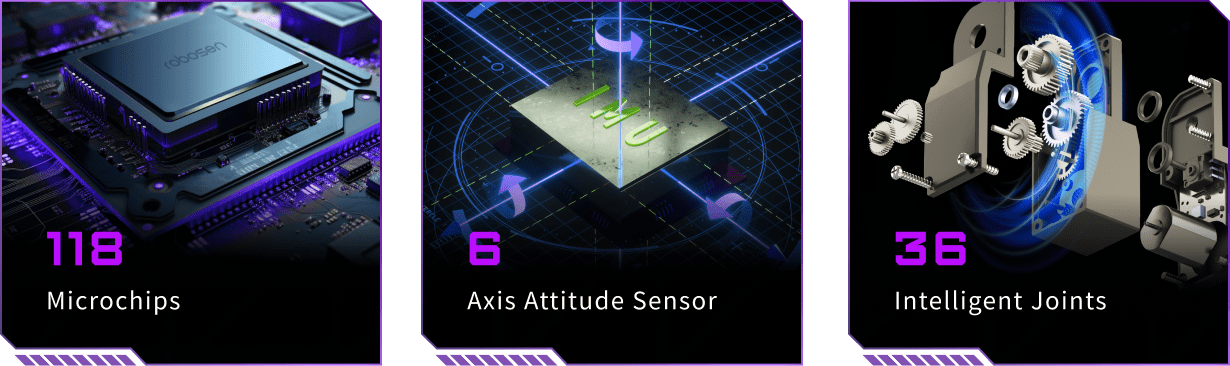
Cette version de "Megatron" est équipée de plus de 4500 pièces, incluant 36 articulations intelligentes de haute précision développées en interne. Elle utilise 118 microprocesseurs pour le contrôle du mouvement basé sur des algorithmes et dispose d'un capteur d'attitude à six axes, permettant des mouvements stables et flexibles.
Mouvements complexes et conversions
Pour les robots, les servomoteurs qui pilotent chaque articulation sont les composants les plus critiques. La mobilité d'un robot, ou la rapidité, la stabilité et la précision de ses actions dépendent de la performance des servomoteurs. Après tout, les servomoteurs (ou plus communément appelés moteurs) agissent à la fois comme "muscles" et "articulations" pour les robots. Ils doivent entraîner chaque segment du corps pour se mouvoir (équilibre dynamique) et doivent également posséder une force mécanique suffisante pour supporter différentes postures du robot (stabilité statique).
Plus il y a de servomoteurs, plus il y a d'articulations mobiles, et plus le robot peut effectuer des mouvements complexes et réaliser des conversions plus délicates. Cependant, un plus grand nombre de servomoteurs augmente naturellement les exigences esthétiques pour la structure du robot et la force mécanique des servomoteurs eux-mêmes.
En comparaison avec les robots humanoïdes ordinaires, la "conversion automatique" est la principale caractéristique de Megatron. Cela signifie que tous ses servomoteurs doivent être capables de fonctionner à la fois en "mode tank" et en "mode humain". Certains servomoteurs peuvent être utilisés pour faire "marcher" le robot en mode humain, mais en mode tank, ils doivent être utilisés pour entraîner le mouvement du véhicule.
Cela rend non seulement la structure mécanique interne de Megatron beaucoup plus complexe, mais cela nécessite également le développement de servomoteurs spécifiques haute performance qui sont non seulement de petite taille mais possèdent également un couple élevé pour mouvoir son corps massif.
Outre la performance, d'autres facteurs doivent être pris en compte pour les servomoteurs, y compris la conception structurelle des matériaux de la coque externe, la planification rationnelle du processus de conversion, la séquence, et les facteurs physiques comme la résistance à la friction et le déplacement du centre de gravité.
Haute fidélité et haute performance
Étant donné que Megatron est un produit de collaboration IP, cela signifie que les ingénieurs et les concepteurs doivent s'assurer que l'apparence est fidèlement restaurée tout en intégrant les servomoteurs qui soutiennent le mouvement de chaque articulation dans son corps. Par conséquent, de nombreux servomoteurs doivent être redessinés en termes d'apparence et de taille pour s'adapter aux proportions corporelles de Megatron. Simultanément, les servomoteurs redessinés entraînent des changements de performance, et la question de savoir s'ils peuvent fournir suffisamment d'énergie cinétique et de soutien pour le robot devient un "paradoxe" technique attaché.
En termes d'algorithme de mouvement de conversion et d'algorithme de démarche du robot, étant donné que Megatron lui-même est plus grand, plus lourd et possède beaucoup plus d'articulations, cela signifie que lorsqu'il "se déplace", surtout lorsqu'il marche sur deux jambes, presque tous les servomoteurs dans le corps doivent être continuellement ajustés pour maintenir l'équilibre du centre de gravité pendant le processus de "pas" du robot.
Cela nécessite évidemment que des dizaines de servomoteurs et leurs algorithmes de pilotage coopèrent étroitement, et plus important encore, suffisamment de capteurs à l'intérieur du robot doivent détecter en continu le centre de gravité, la force de frottement, l'angle et d'autres données.
Découvrez plus sur les innovations de Robosen et restez à jour avec les nouvelles sorties en visitant notre site web.

{kind=link}
Laisser un commentaire
Tous les commentaires sont modérés avant d'être publiés.
Ce site est protégé par hCaptcha, et la Politique de confidentialité et les Conditions de service de hCaptcha s’appliquent.